为 Qt Design Studio 应用创建 C++ 后端
《Robotarm》示例演示如何将 C++ 后端添加到在 Qt Design Studio 中创建的 3D 项目。
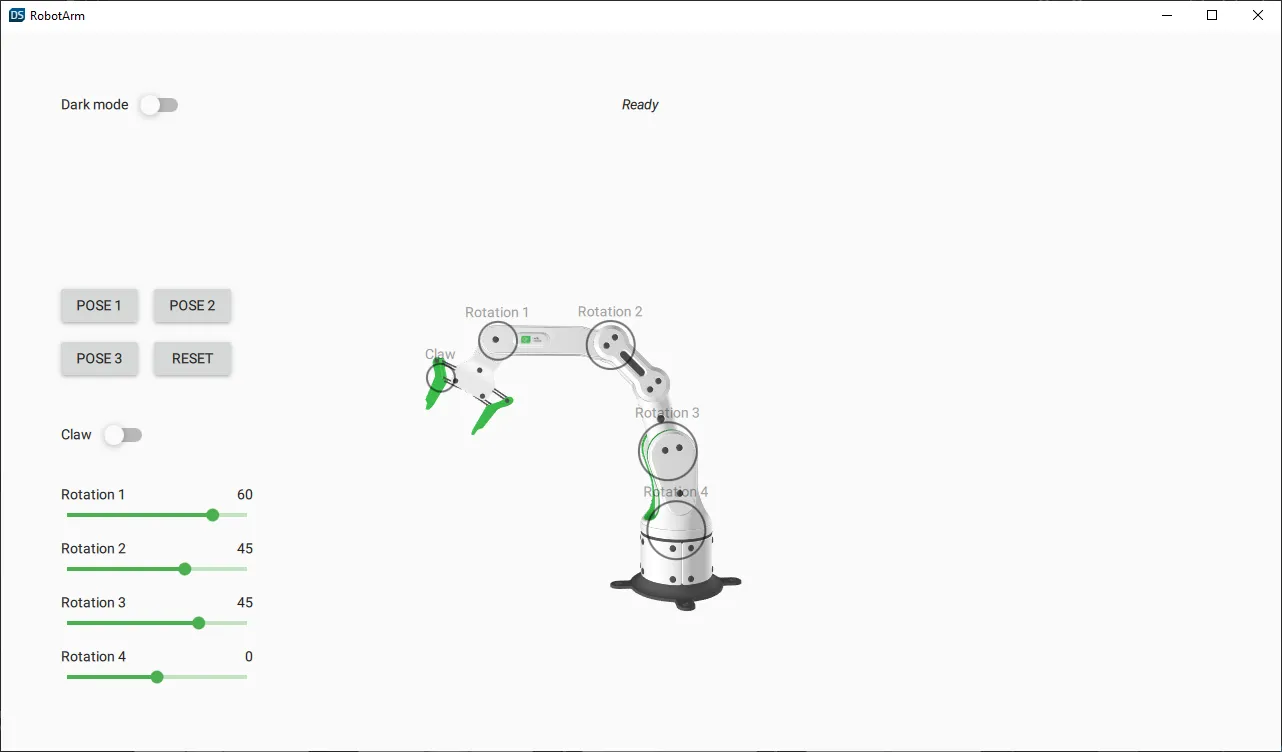
该示例本身由一个交互式工业机械臂组成,在 Qt Quick 3D 场景中。用于控制机械臂的 2D UI 是使用 Qt Quick Controls 实现的。
您可以从 Qt Design Studio 中的 示例 选项卡在 欢迎 页面上打开此示例。
要完成本教程,您需要具备使用 Qt Design Studio 和 Qt Creator 的经验,以及 C++ 编程知识。
设计师-开发者工作流程
本节描述创建机器人臂示例的高级步骤。
创建用户界面
首先,设计师在 Qt Design Studio 中创建用户界面。
- 创建一个新的 3D 项目。
- 导入 3D 资产(RoboticArm)。
- 创建以下自定义组件
- NodeIndicator:该组件由一个圆形矩形和一个标签组成。它用于指示哪个关节在机械臂中是当前活动的。位于 3D 场景中,它跟随 3D 模型的移动。
- LabeledSlider:这是一个带有标签的滑块。它与不同机械臂部件的旋转连接,因此您可以使用它来控制这些部件的旋转。
- Toggle:该组件由一个开关和一个标签组成。它在两个地方使用;用于切换深色模式和切换机械臂的爪子。
- Backend:这为 Qt Design Studio 应用提供了一个模拟后端。一旦您在 Qt Creator 中打开、编译和运行应用程序,它将使用 C++ 后端。
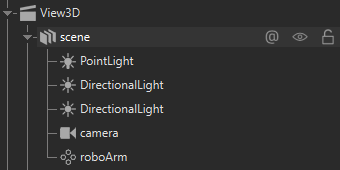
- 将 3D 模型和灯光添加到 View3D 场景中。
- 创建 2D UI 控件
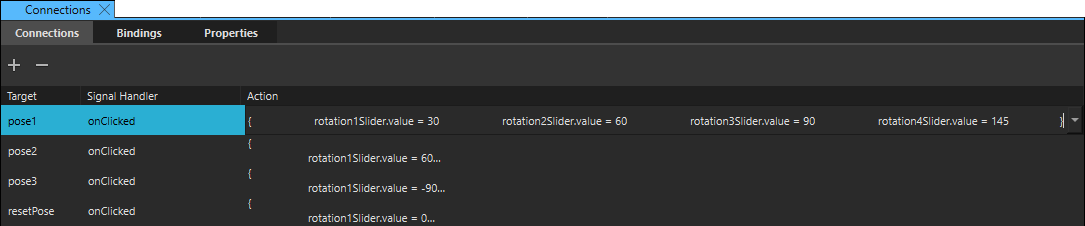
- 四个用于预设位置的按钮。如您从 连接 视图中的 连接 选项卡中看到的,每个按钮都会改变机械臂部件的旋转。
- 四个滑块用于分别控制机械臂部件。后端组件使用这些滑块来控制机械臂的位置。
- 控制机器人机械臂爪的开关。这也是通过后端组件完成的。
- 切换应用程序的暗黑模式。
- 一个标签,通过后端组件显示机器人机械臂的状态。
- 四个用于预设位置的按钮。如您从 连接 视图中的 连接 选项卡中看到的,每个按钮都会改变机械臂部件的旋转。
创建 C++ 后端
前端和用户界面创建完成后,是时候创建 C++ 后端了。
在 Qt Creator 中打开项目
- 在机器人机械臂示例的根目录中打开
CMakeLists.txt。这是 CMake 项目文件。 - 在 Qt Creator 中,在
backend文件夹中添加空的 C++ 后端类。 - 确保
backend文件夹中的CMakeLists.txt文件包含这些类。其外观应类似于以下内容find_package(Qt6 REQUIRED COMPONENTS Gui) qt_add_qml_module(backend URI Backend VERSION 1.0 SOURCES animatedparam.cpp animatedparam.h backend.cpp backend.h ) target_link_libraries(backend PRIVATE Qt6::Gui) - 将后端逻辑添加到创建的后端类中。
在某些 Qt 许可证下免费提供。
了解更多。
