Qt Quick 3D 物理引擎 - 叶轮示例
演示使用触发体和碰撞信息。
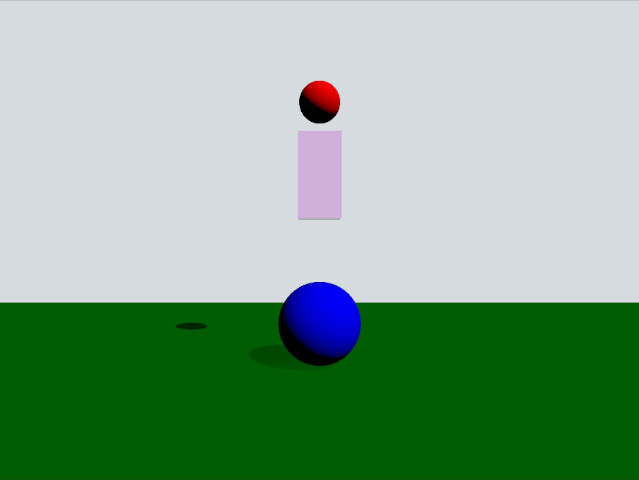
此示例演示了如何使用触发体和碰撞信息。场景包括一个绿色静态平面、一个红色动态球体、一个粉色盒子触发体和一个蓝色静态球体。当红色球体与触发体重叠时,它会变成黄色,当它与蓝色球体碰撞时,它将被推开。
设置
像往常一样,我们需要添加我们的 PhysicsWorld。
PhysicsWorld { gravity: Qt.vector3d(0, -490, 0) scene: viewport.scene }
我们还添加了一个 View3D,其中放置我们的场景对象。在这里,我们有视觉环境的设置。
environment: SceneEnvironment { clearColor: "#d6dbdf" backgroundMode: SceneEnvironment.Color } PerspectiveCamera { position: Qt.vector3d(0, 200, 1000) clipFar: 2000 clipNear: 1 } DirectionalLight { eulerRotation.x: -45 eulerRotation.y: 45 castsShadow: true brightness: 1 shadowFactor: 100 }
物理对象
我们有我们的常规静态平面
StaticRigidBody { position: Qt.vector3d(0, -100, 0) eulerRotation: Qt.vector3d(-90, 0, 0) collisionShapes: PlaneShape {} Model { source: "#Rectangle" scale: Qt.vector3d(500, 500, 1) materials: PrincipledMaterial { baseColor: "green" } castsShadows: false receivesShadows: true } }
这是我们的动态球体的定义方式
DynamicRigidBody { id: sphere massMode: DynamicRigidBody.CustomDensity density: 0.00001 position: Qt.vector3d(0, 600, 0) property bool inArea: false sendContactReports: true receiveTriggerReports: true onEnteredTriggerBody: { inArea = true } onExitedTriggerBody: { inArea = false } collisionShapes: SphereShape {} Model { source: "#Sphere" materials: PrincipledMaterial { baseColor: sphere.inArea ? "yellow" : "red" } } }
inArea 属性是我们使用的一个自定义属性,用于跟踪球体何时与盒子触发体重叠。然后它被用于 baseColor 属性,当球体与盒子重叠时变成黄色,否则是红色。由于我们希望球体参与接触报告,因此需要将属性 sendContactReports 设置为 true。由于我们还需要在球体进入和离开 TriggerBody 时获取回调,因此将属性 receiveContactReports 也设置为 true。在球体上实现 enteredTriggerBody 和 exitedTriggerBody 信号方法,在进入或离开触发体时将 inArea 属性设置为 true 或 false。
现在让我们看看触发体
TriggerBody { position: Qt.vector3d(0, 350, 0) scale: Qt.vector3d(1, 2, 1) collisionShapes: BoxShape { id: boxShape } Model { source: "#Cube" materials: PrincipledMaterial { baseColor: Qt.rgba(1, 0, 1, 0.2) alphaMode: PrincipledMaterial.Blend } } }
qml 类型是 TriggerBody,它像静态体一样工作,除了其碰撞是无活动的。相反,它将触发球体的 enteredTriggerBody 和 exitedTriggerBody 方法调用。
最后,让我们看看叶轮
StaticRigidBody { position: Qt.vector3d(0, 0, 0) scale: Qt.vector3d(2, 2, 2) receiveContactReports: true collisionShapes: SphereShape {} Model { source: "#Sphere" materials: PrincipledMaterial { baseColor: "blue" } } onBodyContact: (body, positions, impulses, normals) => { for (var normal of normals) { let velocity = normal.times(-700) body.setLinearVelocity(velocity) } } }
这是一个静态体,我们设置 receiveContactReports 为 true 以启用碰撞回调。每当报告碰撞时,回调 bodyContact 会被调用。在方法中,我们调用 setLinearVelocity 来设置线性速度,其方向与碰撞法向量相反,以模拟叶轮。
文件
© 2024 Qt公司有限公司。本文件中包含的文档贡献属于其各自的版权所有者。本文件提供的文档根据自由软件基金会的发布,遵循GNU自由文档许可协议第1.3版的条款进行许可。Qt及其相关标志是芬兰及/或其他国家的Qt公司有限公司的商标。所有其他商标均为其各自所有者的财产。
