QGyroscopeReading 类
QGyroscopeReading 类表示陀螺仪传感器的读取。 更多...
| 头文件 | #include <QGyroscopeReading> |
| CMake | find_package(Qt6 REQUIRED COMPONENTS Sensors) target_link_libraries(mytarget PRIVATE Qt6::Sensors) |
| qmake | QT += sensors |
| 继承 | QSensorReading |
属性
公共函数
详细描述
QGyroscopeReading 单位
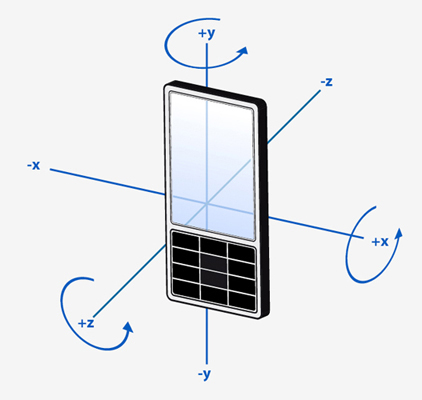
读取包含 3 个值,以每秒度为单位测量,定义设备围绕 x、y 和 z 轴的运动。与 QRotationReading 不同,这些值代表当前的角速度,而不是固定的旋转。测量单位为每秒度。
© 2024 The Qt Company Ltd. 本文档中的贡献版权属于各自的拥有者。在此提供的文档是根据自由软件基金会发布的GNU自由文档许可协议版本1.3许可的。Qt及其标志是世界各地芬兰和/或其他国家的The Qt Company Ltd的商标。所有其他商标均为各自所有者的财产。
