QRotationReading 类
QRotationReading 类表示旋转传感器的读取之一。更多...
| 头文件 | #include <QRotationReading> |
| CMake | find_package(Qt6 REQUIRED COMPONENTS Sensors) target_link_libraries(mytarget PRIVATE Qt6::Sensors) |
| qmake | QT += sensors |
| 继承 | QSensorReading |
属性
公开函数
| void | setFromEuler(qreal x, qreal y, qreal z) |
| qreal | x() const |
| qreal | y() const |
| qreal | z() const |
详细描述
QRotationReading 单位
旋转读取包含 3 个角度,以度为单位测量,定义了设备在三维空间中的方向。这些角度类似于偏航、俯仰和翻滚,但仅使用右手规则和右手笛卡尔坐标系定义的轴来定义。
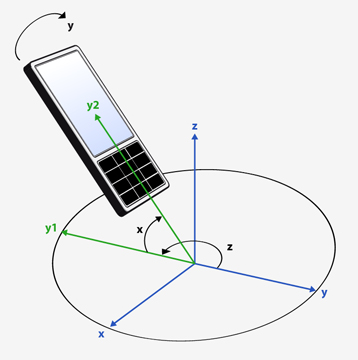
这三个角度按以下顺序应用到设备上。
- 右手旋转 z (-180, 180]。从 y 轴开始,逆时针方向增加。
- 右手旋转 x [-90, 90]。从新的(已旋转)y 轴开始,向 z 轴增加。
- 右手旋转 y (-180, 180]。从新的(旋转两次)z 轴开始,向 x 轴增加。
以下是显示角度应用顺序的可视化。
z 角度的 0 点定义为一个固定的、外部的实体,并且是设备特定的。虽然通常使用磁北作为这个参考点,但它可能不是。不要尝试在设备之间或同一设备上(如果它已经移动了很大一段距离)比较 z 角度的值。
如果设备无法检测到一个固定的、外部的实体,则 z 角度始终为 0,并且将设置 QRotationSensor::hasZ 属性为 false。
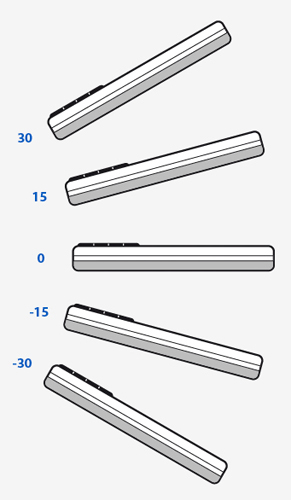
当设备移动时,x 值将如何改变的一个示例。
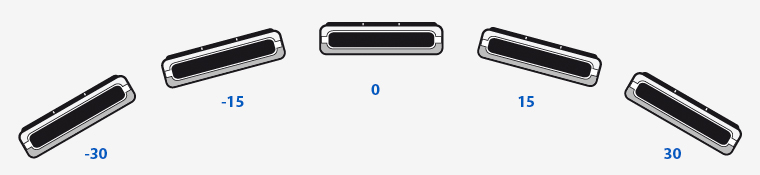
当设备移动时,y 值将如何改变的一个示例。
请注意,当 x 为 90 或 -90 时,z 和 y 对同一轴的旋转值将达到(由于操作顺序)。在这种情况下,y 旋转将为 0。
属性文档
[只读] x : const qreal
此属性保存绕x轴的旋转。
以度数进行测量。
访问函数
| qreal | x() const |
另请参阅 QRotationReading 单位.
[只读] y : const qreal
此属性保存绕y轴的旋转。
以度数进行测量。
访问函数
| qreal | y() const |
另请参阅 QRotationReading 单位.
[只读] z : const qreal
此属性保存绕z轴的旋转。
以度数进行测量。
访问函数
| qreal | z() const |
另请参阅 QRotationReading 单位.
© 2024 The Qt Company Ltd. 本文档中的贡献的版权属于其各自的拥有者。本提供的文档是根据自由软件基金会的自由文档许可协议(GNU Free Documentation License version 1.3)的条款许可的。
