- class QGyroscopeReading#
QGyroscopeReading类表示陀螺仪传感器的读数。更多...概要#
属性#
方法#
注意
本文档可能包含从 C++ 自动翻译到 Python 的代码片段。我们始终欢迎对代码片段的翻译做出贡献。如果您发现翻译存在问题,您也可以通过在 https:/bugreports.qt.io/projects/PYSIDE 上创建工单来让我们知道。
详细说明#
QGyroscopeReading 单位#
读数包含 3 个值,以每秒度数测量,定义了设备在 x、y 和 z 轴周围的移动。与
QRotationReading不同,这些值表示当前角速度,而不是固定旋转。测量以每秒度数为单位。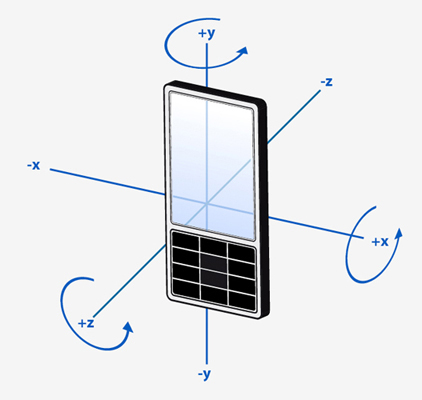
注意
当使用
from __feature__ import true_property时,可以直接使用属性,否则通过访问函数使用。- property x: float#
此属性持有着围绕 x 轴的角速度。
每秒度数测量。
另请参阅
QGyroscopeReading 单位- 访问函数
- 属性 yᅟ: float#
此属性存储围绕y轴的角速度。
每秒度数测量。
另请参阅
QGyroscopeReading 单位- 访问函数
- 属性 zᅟ: float#
此属性存储围绕z轴的角速度。
每秒度数测量。
另请参阅
QGyroscopeReading 单位- 访问函数
- setX(x)#
- 参数:
x – float
设置围绕x轴的角速度为
x。另请参阅
- setY(y)#
- 参数:
y – float
设置围绕y轴的角速度为
y。另请参阅
- setZ(z)#
- 参数:
z – float
设置围绕z轴的角速度为
z。另请参阅
获取属性
xᅟ的值。获取属性
yᅟ的值。获取属性
zᅟ的值。
回到顶部