机器人臂
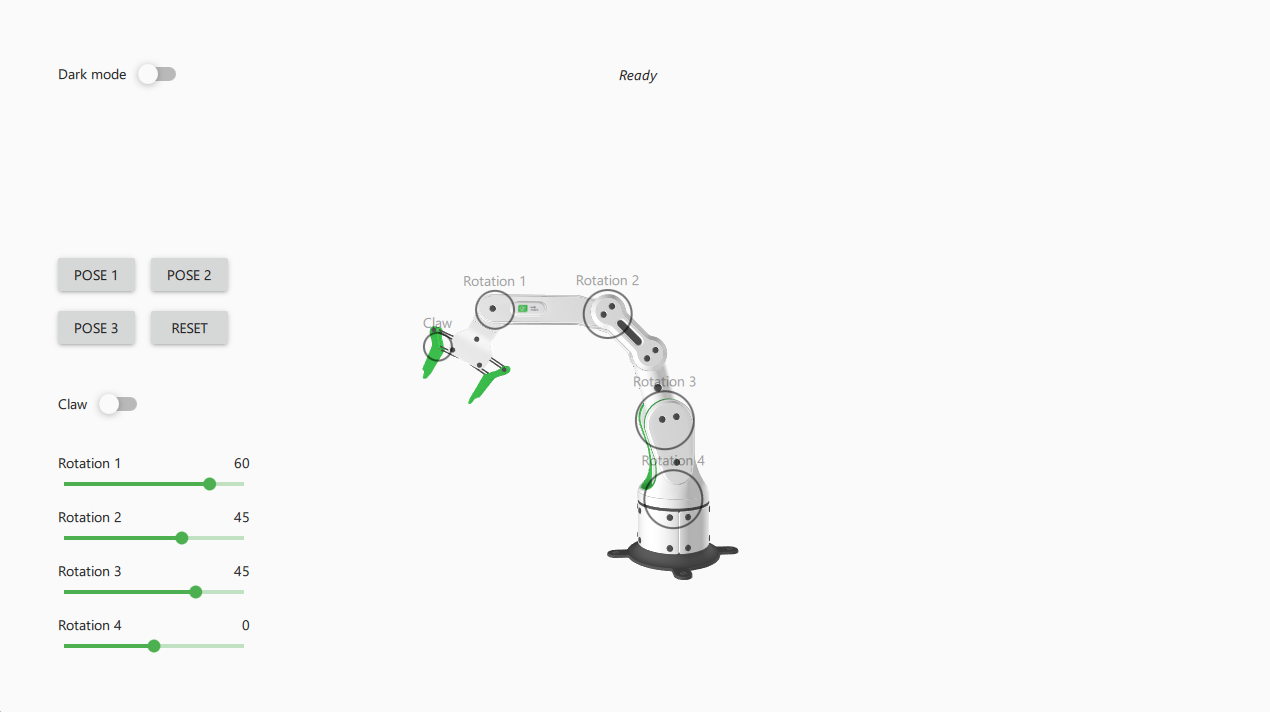
演示了如何将 C++ 后端添加到由 Qt Design Studio 创建的 3D 项目中。该示例演示了如何将 C++ 后端添加到由 Qt Design Studio 创建的 3D 项目中。示例本身包含一个交互式工业机器人臂,位于 Qt Quick 3D 场景中。控制机器人臂的 2D UI 是使用 Qt Quick Controls 实现的。
对于 Qt Design Studio,机器人臂示例附带一个简单的基于 QML 的 QML 模块,位于 backend_moc/Backend/Backend_moc.qml,当与 Qt Design Studio 一起使用时,用作项目的后端。C++ 应用程序实现了一个兼容的后端,作为基于 C++ 的 QML 模块。这两个 QML 模块实现了相同的 API,这确保了两个模块之间的兼容性。
机器人臂的 Qt Quick 3D 场景在 content/RoboticArm.ui.qml 中定义。2D UI 在 content/MainScreen.ui.qml 中实现,既响应式也支持亮暗模式。示例使用 Qt Quick Controls 中的 Material 样式和亮暗主题来实现两种模式。
运行示例
要从 Qt Creator 运行示例,请打开 欢迎 模式并从 示例 中选择示例。有关更多信息,请访问 构建和运行示例。
注意:示例使用了 Qt Quick 3D 模块,该模块是 Qt 在线安装程序 中的单独项目。如果示例配置失败,请确保您已安装 Qt Quick 3D 包。
© 2024 The Qt Company Ltd。本文件中包含的文档贡献者是他们的各自所有者的版权。本文件中提供的文档是在自由软件基金会(Free Software Foundation)按照 GNU 自由文档许可证版本 1.3 的条款下许可的。Qt 及其相关标志是 The Qt Company Ltd. 在芬兰和/或其他国家的商标。所有其他商标均为其各自所有者的财产。
